I am an undergraduate student at Yuanpei College, Peking University (PKU). I am advised by Prof. Yixin Zhu at CoRe Lab. I am also working on research under the guidance of Kaichen Zhou from the Harvard AI and Robotics Lab.
My research passion lies in embodied AI, with a focus on mobile manipulation and 3D reconstruction. I aim to build digital twins that seamlessly fuse the virtual and physical worlds by harnessing large-scale parallel simulation, ultimately creating general-purpose robotic models that can both perceive and reconstruct. I’m always eager to explore fresh ideas and collaborations—let’s connect!
In addition to my research, I am an amateur photographer and motorcyclist. Love for life and the savor of freedom lingers without a moment’s lapse.
🔥 News
- 2026.02: 🎉🎉 AutoMoMa is accepted by CVPR 2026!
- 2026.01: 🎉🎉 PAGE-4D is accepted by ICLR 2026!
- 2025.06: 🎉🎉 AutoMoMa is accepted by RSS 2025 MoMa!
- 2025.06: 🎉🎉 TerraX is accepted by IROS 2025 as Oral!
- 2025.02: 🎉🎉 SplatMesh is accepted by CVPRW 2025!
📝 Publications
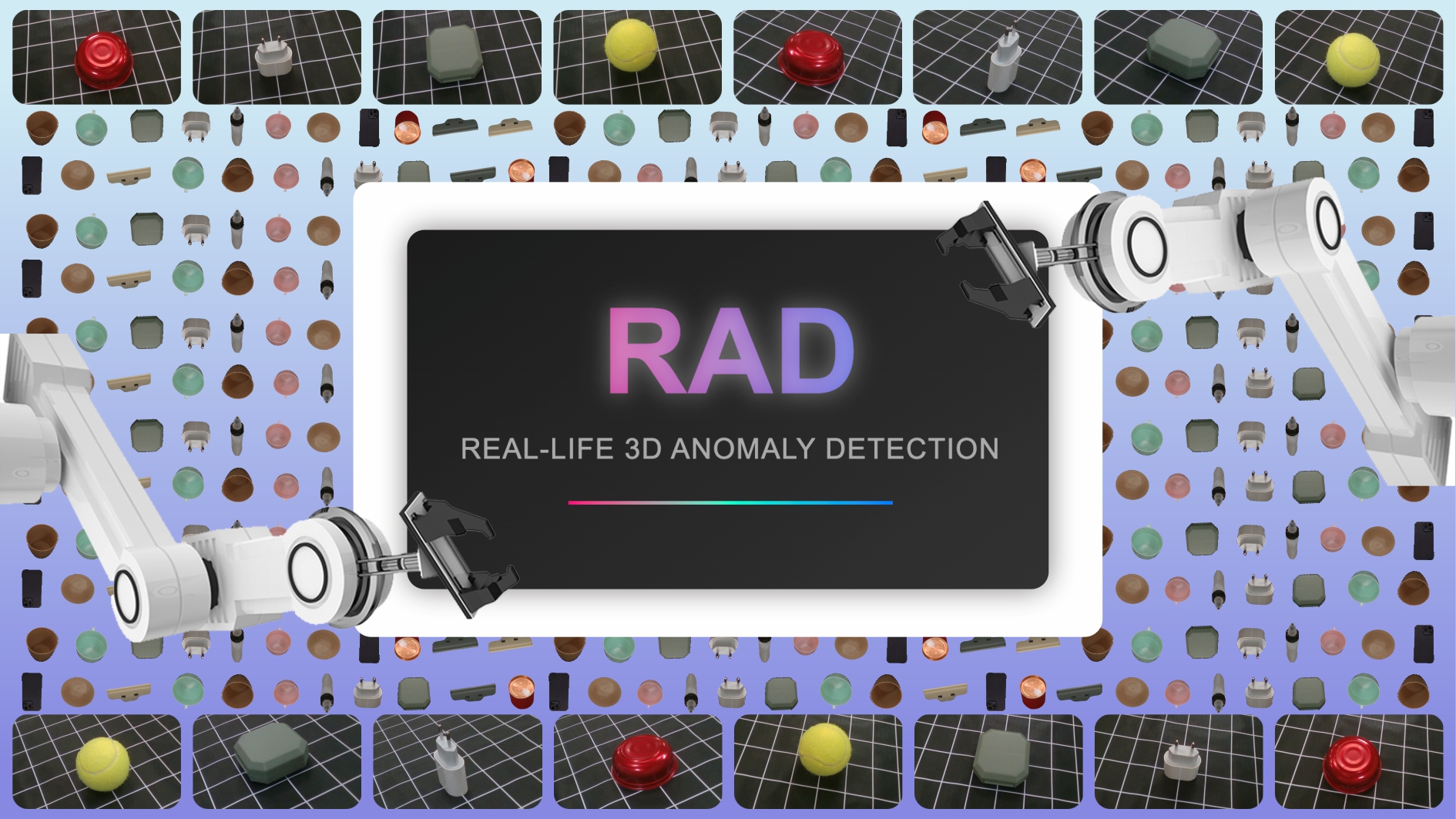
RAD: A Realistic Multi-View Benchmark for Pose-Agnostic Anomaly Detection
Kaichen Zhou*, Xinhai Chang*, Taewhan Kim*, Jiadong Zhang*, Yang Cao, Chufei Peng, Fangneng Zhan, Hao Zhao, Hao Dong, Kai Ming Ting, Ye Zhu
- RAD (Realistic Anomaly Detection) is a robot-captured, multi-view dataset designed to address the challenges of pose variation, reflective materials, and viewpoint-dependent defect visibility. It provides a benchmark for pose-agnostic anomaly detection across 13 object categories under uncontrolled lighting conditions.
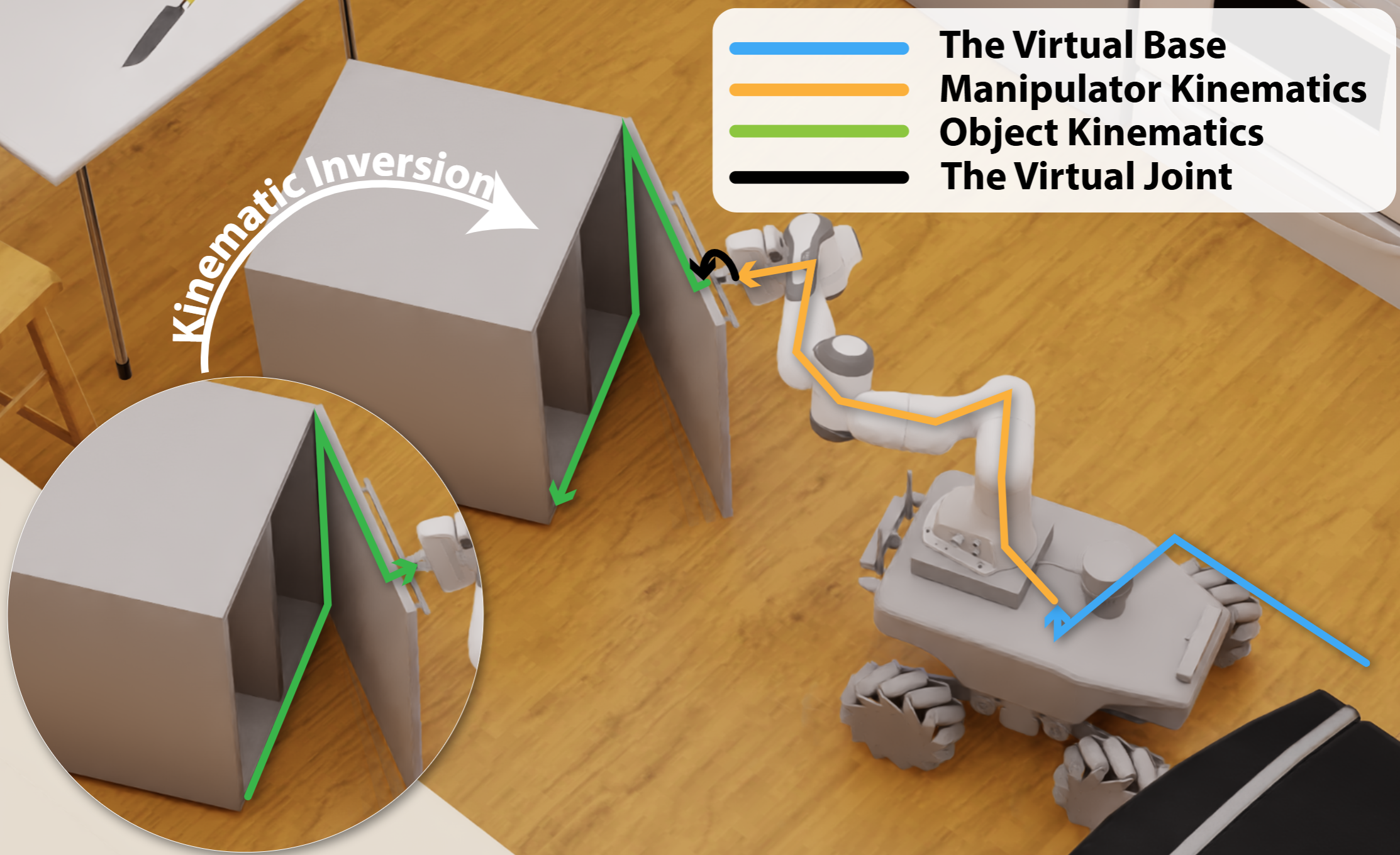
AutoMoMa: Scalable Coordinated Mobile Manipulation Trajectory Generation
Yida Niu*, Xinhai Chang*, Xin Liu*, Ziyuan Jiao, Yixin Zhu
- AutoMoMa is a system that efficiently generates high-quality whole-body trajectories using Virtual Kinematic Chain (VKC) modeling and GPU-accelerated motion planning at a rate of 2.5k valid episodes per hour per consumer-level GPU, which generalizes across diverse household layouts, interactive objects, robot morphologies, and manipulation tasks while ensuring physical feasibility and strict constraint satisfaction.
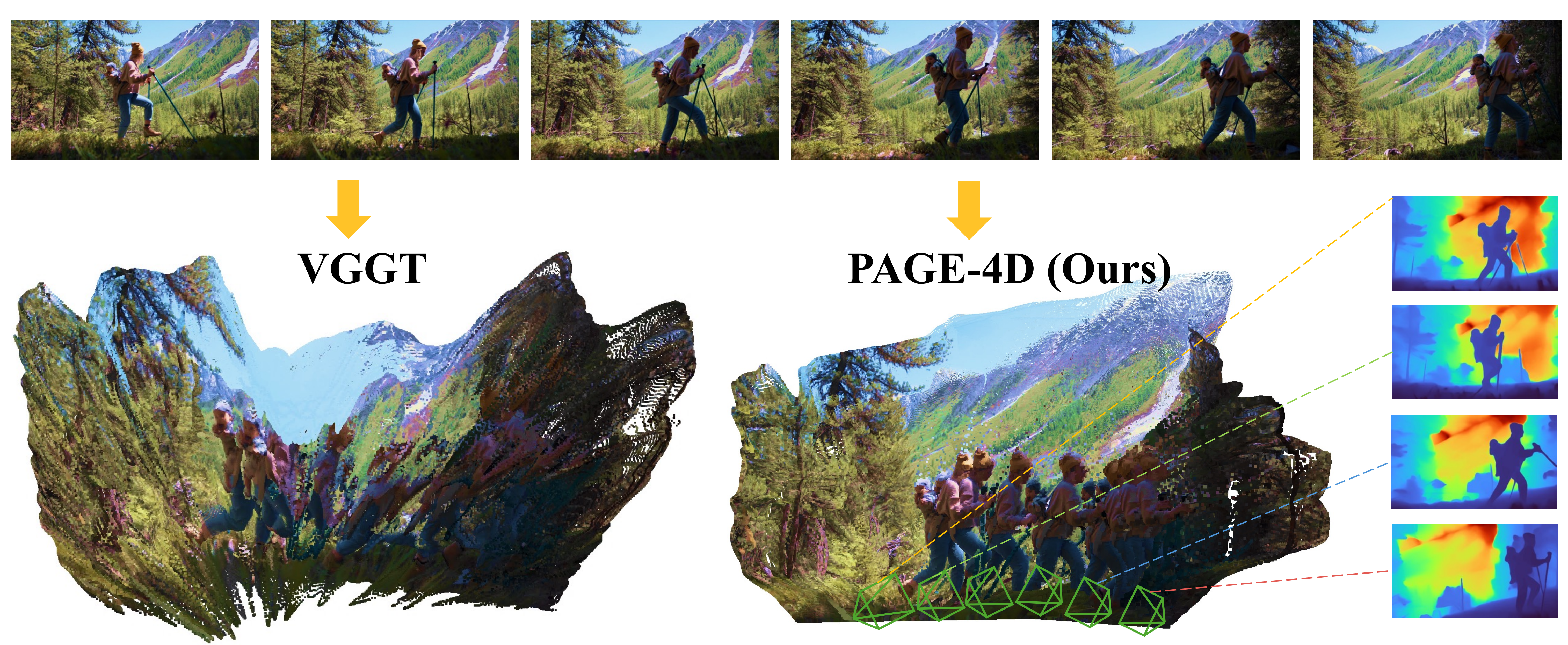
PAGE-4D: Disentangled Pose and Geometry Estimation for 4D Perception
Kaichen Zhou*, Yuhan Wang*, Grace Chen*, Xinhai Chang, Gaspard Beaudouin, Fangneng Zhan, Paul Pu Liang, Mengyu Wang
- PAGE-4D is a feedforward 4D perception model that disentangles static and dynamic scene elements to simultaneously achieve accurate camera pose estimation, depth prediction, and point cloud reconstruction in dynamic environments.
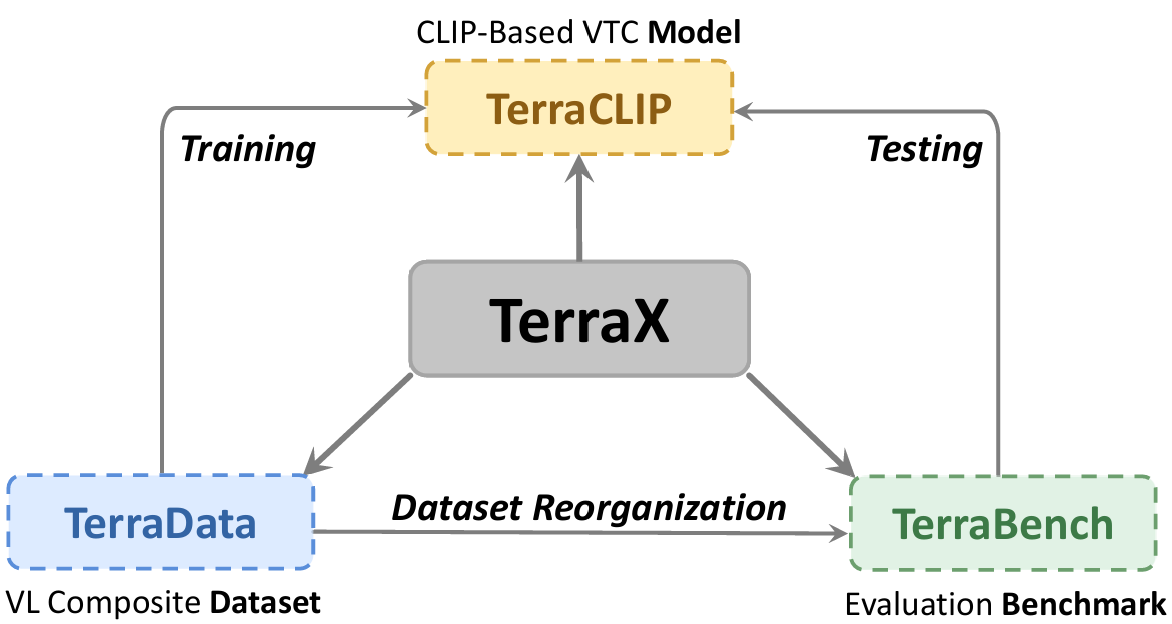
TerraX: Visual Terrain Classification Enhanced by Vision-Language Models
Hongze Li*, Xuchuan Huang*, Xinhai Chang*, Jun Zhou, Huijing Zhao
- TerraX is a vision-language framework for terrain classification, featuring the TerraData dataset, TerraBench benchmark, and TerraCLIP model.
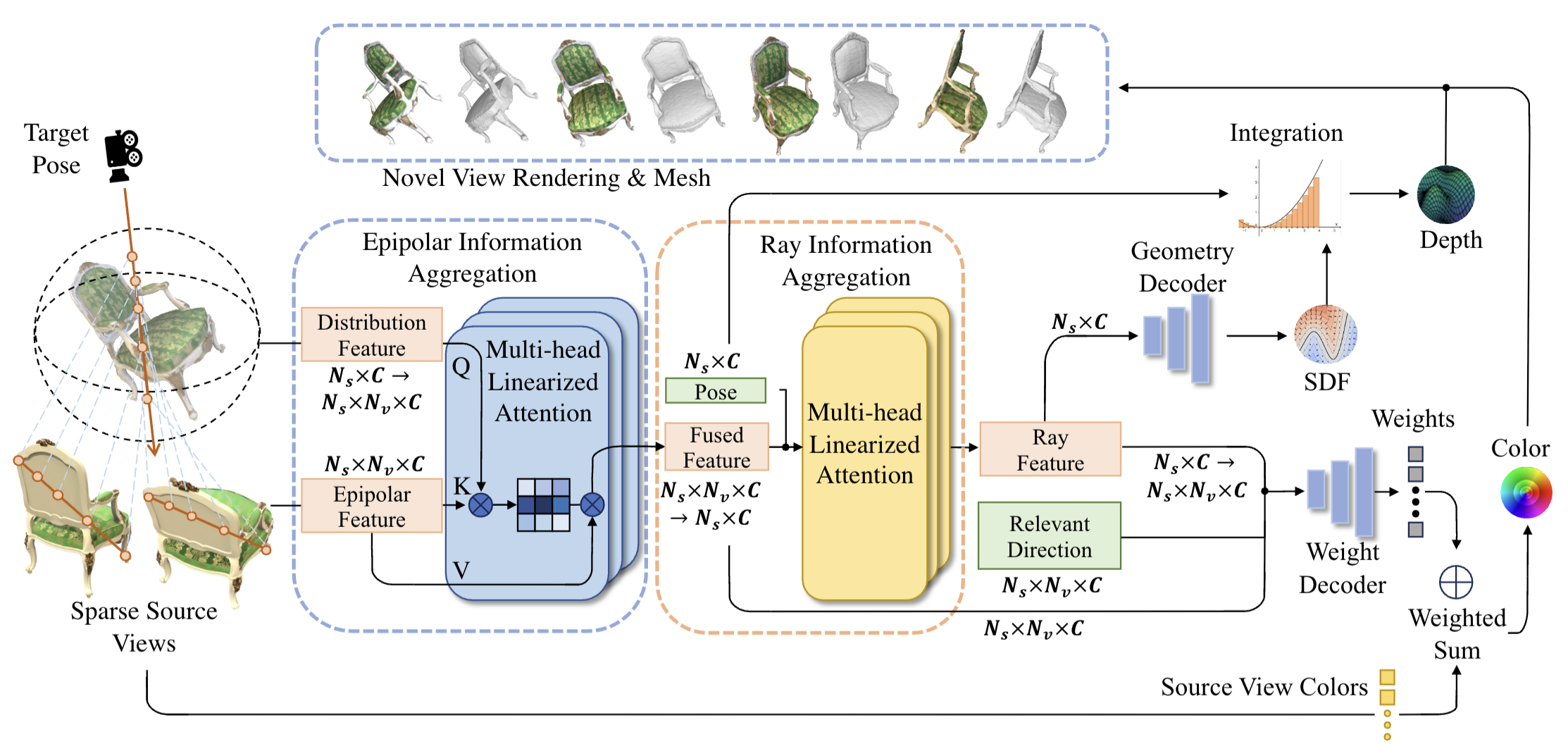
Neural Surface Reconstruction from Sparse Views Using Epipolar Geometry
- EpiS is a generalizable neural surface reconstruction framework that explicitly leverages epipolar geometry. By using an epipolar transformer to fuse multi-view information and incorporating a pretrained monocular depth model for geometry regularization, EpiS achieves state-of-the-art performance in sparse-view surface estimation without per-scene optimization.
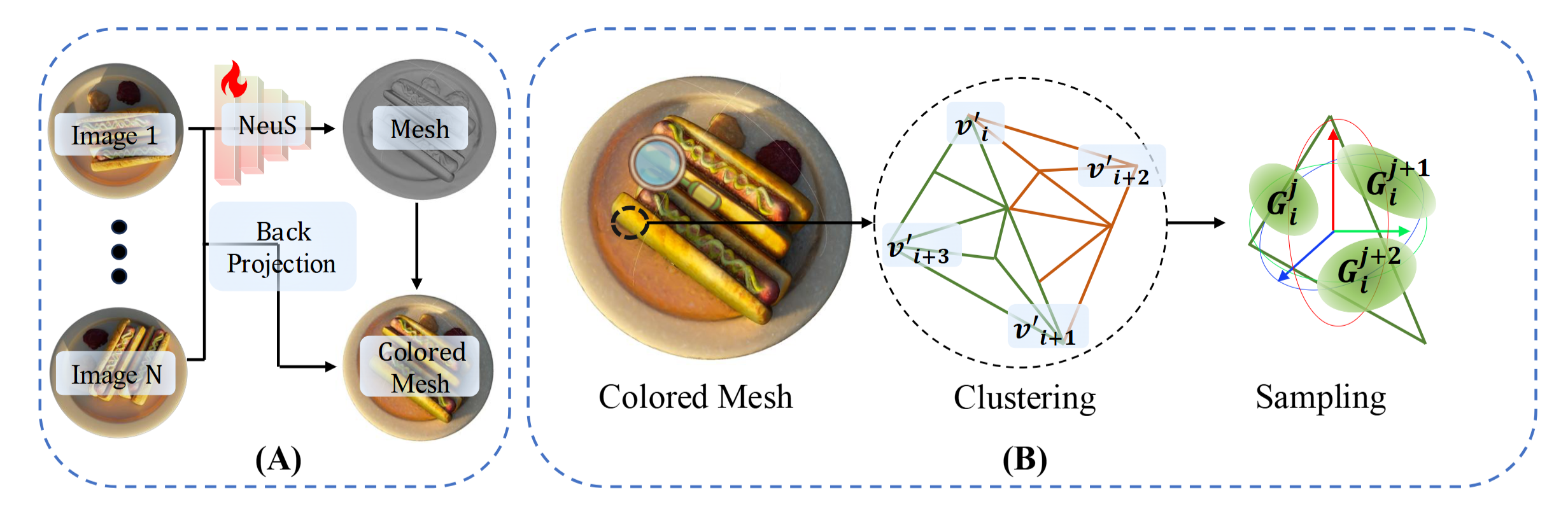
SplatMesh: Interactive 3D Segmentation and Editing Using Mesh-Based Gaussian Splatting
Kaichen Zhou*, Lanqing Hong*, Xinhai Chang*, Yingji Zhong, Enze Xie, Hao Dong, Zhihao Li, Yongxin Yang, Zhenguo Li, Wei Zhang
- SplatMesh is a novel fine-grained interactive 3D segmentation and editing algorithm that integrates 3D Gaussian Splat with a precomputed mesh and could adjust the memory request based on the requirement.
🎖 Honors and Awards
- 2025 National Scholarship
- 2024 Second-class Scholarship, Peking University
- 2024 First Prize, 21st Jiang Zehan Cup Mathematical Modeling Competition
- 2023 Xing Zhengde Scholarship, Yuanpei College
- 2023 Third-class Scholarship, Peking University
📖 Experiences
- 2022.09 - now, Undergraduate Student, Data Science and Artificial Intelligence, Peking University
- 2024.05 - 2024.08, Volunteer Teacher, International Asian Liver Center, Gansu, China
💁 Services
- Teaching Assistant: Introduction to Computation B (Autumn 2025, by Prof. Jun Sun)
- Teaching Assistant: Introduction to Computation C (Autumn 2025, by Prof. Baobao Chang)
- Teaching Assistant: Introduction to Computer System (Autumn 2024, by Prof. Lu Zhang)